In this week I found a problem with the power supply in my electronics set up. Originally, my idea was to power this device with a 3.7V lithium ion battery, but after some testing I found the voltage from the battery to be too low to power my servo motor. The problem stemmed from the fact that the servo motor is ratted at a higher 4.8V. At this nominal voltage, the motor draws around 100 to 300 mA of current. However if I try to run the motor at a lower voltage, the motor will try to consume more more current to output the same amount of power. Power is equals to voltage times current so when I lowered the voltage the motor consumes up to 400 mA or more amount of current. This seems so be more than the battery I have can handle.
Battery Requirements
After discussing this issue with my professor, it was agreed that I need to specify some important requirements for the battery. First of all I must make sure the voltage is high enough to support the motor. Second, I need to make sure the battery life is large enough to last through an entire day. It will be pointless to have a device that can only last a few hours. If this device is to be used in every day life it must at least work through 8 or more hours of continuous use. Since the maximum current draw for the motor at the nominal 4.8V is around 300 mA, I would need a power source that can provide at least 2000 mAh to get the 8 hours of continuous usage that I need. Also, in order to make this device easier to handle by the visually impaired, the batteries would also have to be rechargeable so that the user does not have to mess around with the inner components of the device.
New Power Source Set up
After giving this problem some thought, a good solution to this problem would be to use regular rechargeable AA Ni-MH batteries. They are commercially available, very inexpensive to buy, and often comes with a battery charger. You can purchase a complete set on ebay of less than $15. Since each AA Ni-Mh battery only contains 1.2V, I will need 4 batteries connected in series to get the nominal 4.8V to power the motor. However this also works out since most battery chargers can only charge 4 batteries at a time. I already have an unused 4 battery charger at home so all I need now are the batteries. The 4 pack of batteries that I purchased are from Duracell and they provide up to 2450 mAh per charge. This is fantastic because that’s just the amount of battery life that I need for this project.

Upcoming Tasks
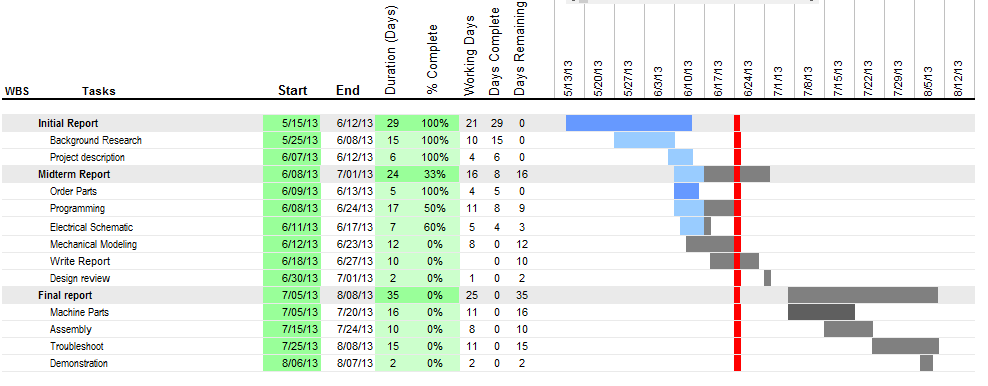
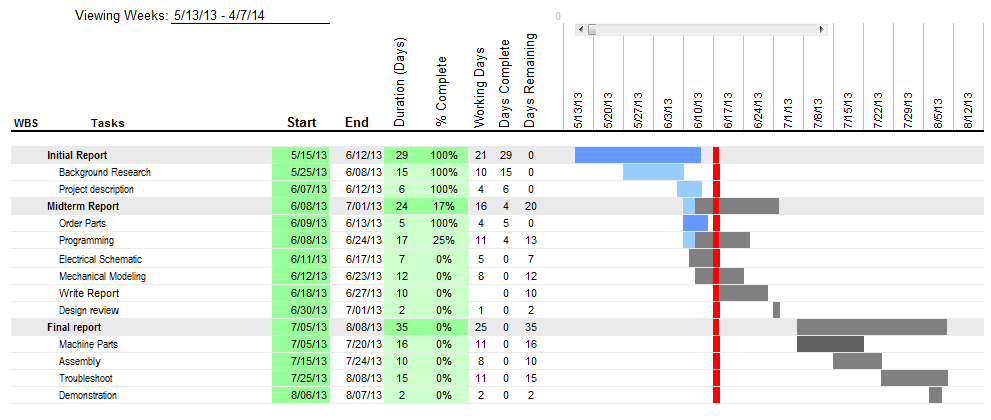
Now that the power supply and the electronic components are figured out, I need to start modelling the mechanical housing that will store all these components. Switching the power supply is a big change in my design and will require some hacking of the battery charger to make it fit with my device. I am aiming to do some mechanical models for the upcoming weeks. The updated gant chart for my progress is shown below.