Hardware Testing and Refinement

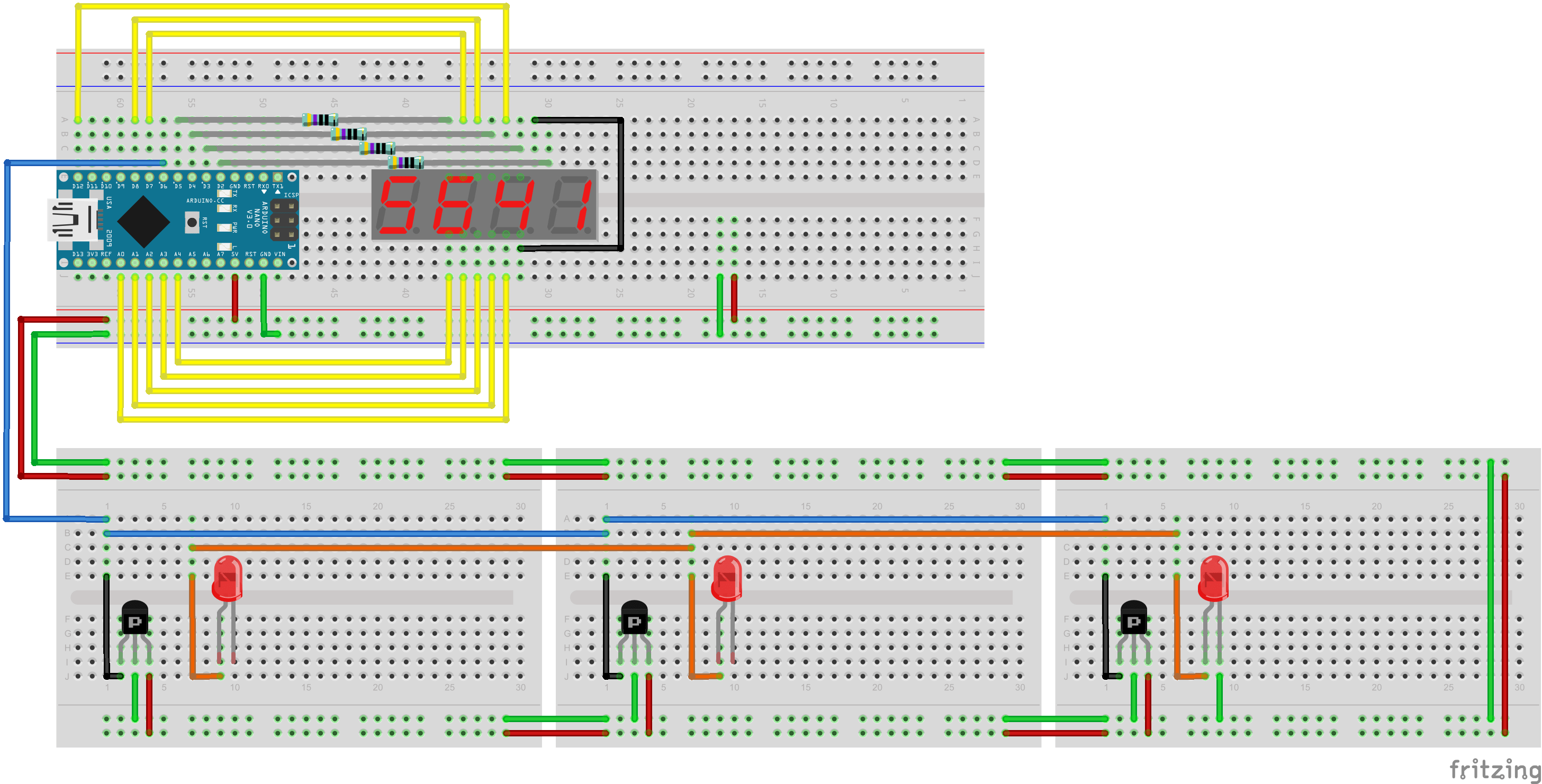
One of the issues I encountered with my proposed setup in Update #1 is that the LED segments will periodically dim. This was because I only used one resistor to power all 7 segments (8 including the dot) in parallel. This would work if all LEDs in the display were manufactured the same way. However, it’s more likely that some LEDs draws more current than the others causing some segments to become slightly brighter while the others dim. The better way to connect the LEDs is to have a resistor after each one. I used a 2K Ω resistor after each segment so that the current flowing through each LED remains low.

This hardware configuration worked out a lot better for me. All the LEDs remained at a constant brightness. I also managed to get the IR Sensor an the IR LED working at the same time. My test code for this setup is shown below.
#include <IRremote.h>
#define RECV_PIN 2
#define DIGIT_1 12
#define DIGIT_2 10
#define DIGIT_3 9
#define DIGIT_4 6
#define SEG_A 7
#define SEG_B 11
#define SEG_C 15
#define SEG_D 17
#define SEG_E 18
#define SEG_F 8
#define SEG_G 14
#define SEG_DOT 16
IRrecv irrecv(RECV_PIN);
IRsend irsend;
decode_results results;
int x = 1;
void setup()
{
irrecv.enableIRIn(); // Start the receiver
Serial.begin(9600);
pinMode(13, OUTPUT);
pinMode(SEG_A, OUTPUT);
pinMode(SEG_B, OUTPUT);
pinMode(SEG_C, OUTPUT);
pinMode(SEG_D, OUTPUT);
pinMode(SEG_E, OUTPUT);
pinMode(SEG_F, OUTPUT);
pinMode(SEG_G, OUTPUT);
pinMode(SEG_DOT, OUTPUT);
pinMode(DIGIT_1, OUTPUT);
pinMode(DIGIT_2, OUTPUT);
pinMode(DIGIT_3, OUTPUT);
pinMode(DIGIT_4, OUTPUT);
digitalWrite(SEG_A, LOW);
digitalWrite(SEG_B, LOW);
digitalWrite(SEG_C, LOW);
digitalWrite(SEG_D, LOW);
digitalWrite(SEG_E, LOW);
digitalWrite(SEG_F, LOW);
digitalWrite(SEG_G, LOW);
digitalWrite(SEG_DOT, LOW);
delay(250);
}
void loop() {
digitalWrite(DIGIT_1, HIGH);
digitalWrite(DIGIT_2, LOW);
digitalWrite(DIGIT_3, LOW);
digitalWrite(DIGIT_4, LOW);
delay(x);
digitalWrite(DIGIT_1, LOW);
digitalWrite(DIGIT_2, HIGH);
digitalWrite(DIGIT_3, LOW);
digitalWrite(DIGIT_4, LOW);
delay(x);
digitalWrite(DIGIT_1, LOW);
digitalWrite(DIGIT_2, LOW);
digitalWrite(DIGIT_3, HIGH);
digitalWrite(DIGIT_4, LOW);
delay(x);
digitalWrite(DIGIT_1, LOW);
digitalWrite(DIGIT_2, LOW);
digitalWrite(DIGIT_3, LOW);
digitalWrite(DIGIT_4, HIGH);
delay(x);
if (irrecv.decode(&results)) {
irrecv.resume(); // Receive the next value
digitalWrite(13, HIGH);
}else{
digitalWrite(13, LOW);
}
if (Serial.read() != -1) {
digitalWrite(DIGIT_1, LOW);
digitalWrite(DIGIT_2, LOW);
digitalWrite(DIGIT_3, LOW);
digitalWrite(DIGIT_4, LOW);
for (int i = 0; i < 3; i++) {
irsend.sendSony(0xa90, 12); // Sony TV power code
delay(40);
}
irrecv.enableIRIn();
}
}